- Téléphone: 0086-021-37901188
- L'adresse Mail: info@triowin.com
- whatsapp: +8613301885621
- wechat: +8613301885621
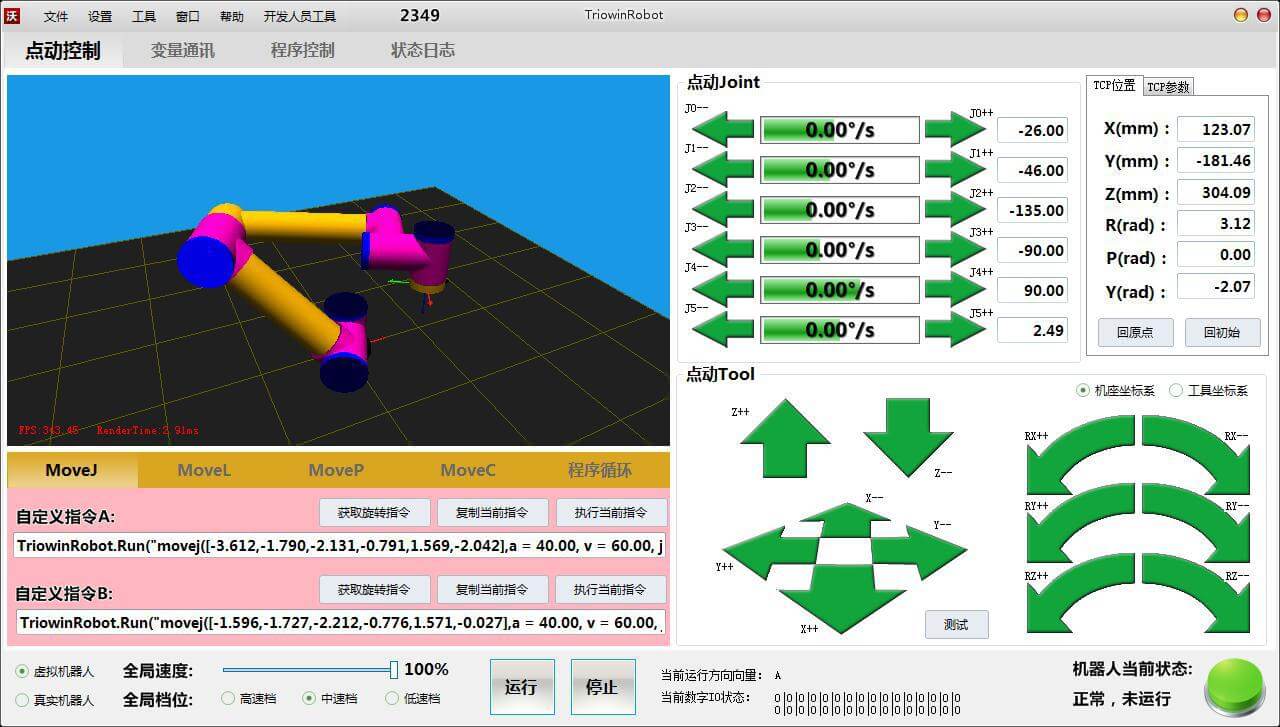
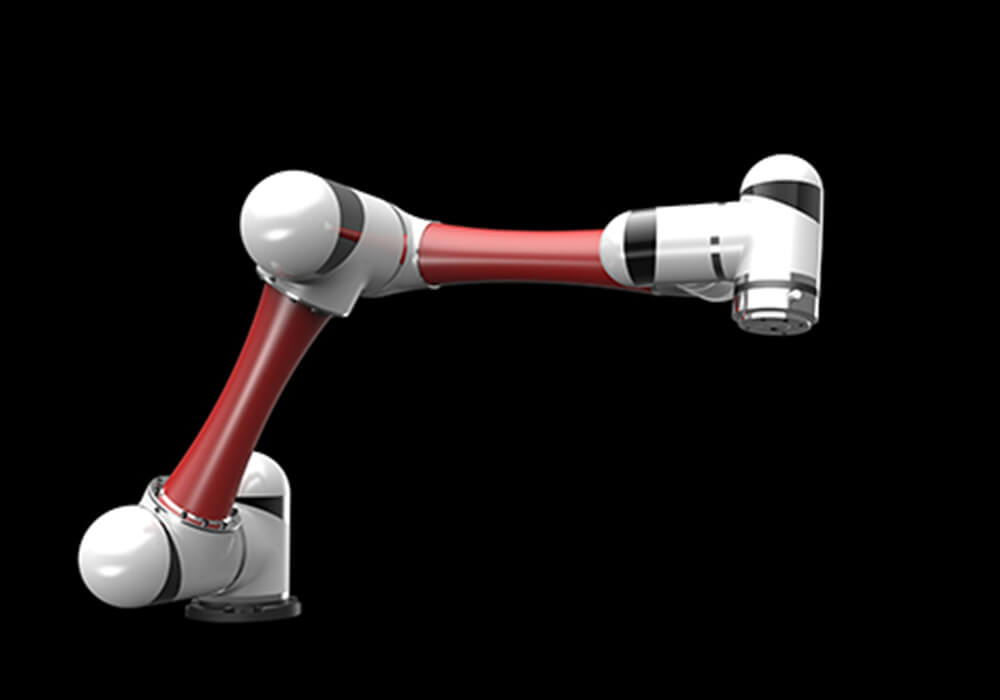
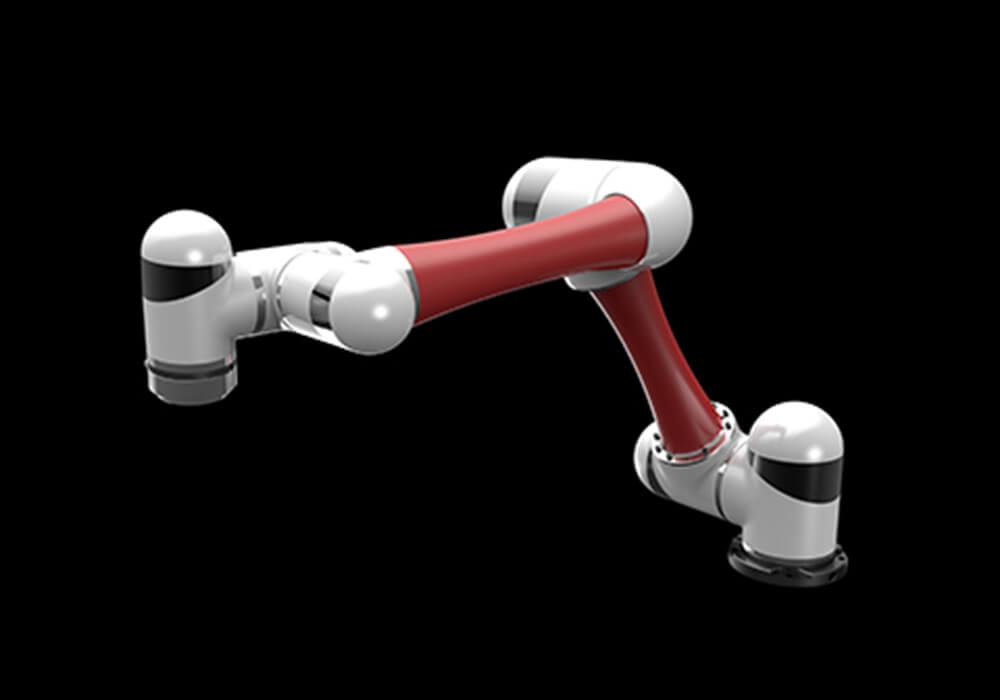
Le robot de collaboration est largement utilisé dans le chargement et le déchargement de la machine-outil, les essais d'assemblage de l'industrie électronique 3C ainsi que l'éducation, les soins de santé ou d'autres industries émergentes. Etant différent de l’opération lourde et complexe du robot traditionnel avec défautts, ce robot peut être déployé de manière flexible dans toute sorte de postes de travail qui sont accomplis par la main précédemment. De plus, il est très facile à apprendre, et l’opérateur ordinaire peut également apprendre l’utilisation en quelques jours. La charge normale du robot est généralement d'environ 3~10KG, et la précision et la vitesse sont un peu plus faibles que le robot traditionnel, mais encore, la plupart des travaux d'automatisation peuvent être accomplis par ce genre de robot et les avantages finaux sont bientôt pris en compte.
|
|
UR5 |
UR10 |
|
|
Bras mécanique de 6 joint |
Bras mécanique de 6 joint |
|
Poids |
18.4kg |
28.9kg |
|
Plage de travail |
5kg |
10kg |
|
Rotation |
850mm |
1300mm |
|
Vitesse maximum |
180/s vitesse TCP: environ 1m/s |
120/180/s vitesse TCPenviron:1m/s |
|
Répétabilité |
+/-0.1mm |
+/-0.1mm |
|
Zone d'installation |
0149mm |
0190mm |
|
Degrés de liberté |
Joints rotatifs 6 |
Joints rotatifs 6 |
|
Taille du contrôleur (hauteur x largeur x longueur)) |
47 mm x 423mm x 268mm |
47 mm x 423mm x 268mm |
|
Entrée-sortie (10) ports de contrôleur |
10DI(contrôleur:8DI;extrémité d'outil:2DI) |
10DI(contrôleur:8DI;extrémité d'outil:2DI) |
|
Capacité de charge de l’entrée-sortie (10) ports de contrôleur |
Contrôleu 24V, 1200Am; |
Contrôleu 24V, 1200Am; |
|
Standard de communication pris en charge |
TCP/IP communication 00Mbps, pour IEEE. Norme 802.3U,pour norme de supports de communication 100BASE-TX. |
TCP/IP communication 00Mbps, pour IEEE. Norme 802.3U,pour norme de supports de communication 100BASE-TX. |
|
Programmation |
Interface graphique d'utilisateur, écran tactile 12 pouces, support de montage accessoire |
Interface graphique d'utilisateur, écran tactile 12 pouces, support de montage accessoire |
|
Bruit |
Faible |
Faible |
|
Protection supplémentaire |
IP54 |
IP54 |
|
Consommatio électrique |
Procédure générale d'environ 200 Watts |
Procédure générale d'environ 350 Watts |
|
Même opération |
Selon ISO 10218-1:2006-5.10.1 et 5.10.5 est le test |
Selon ISO 10218-1:2006-5.10.1 et 5.10.5 est le test |
|
Matériels |
Aluminium,plastique ABS |
Aluminium,plastique ABS |
|
Température |
Température de fonctionnement du bras de robot:0-50°C |
Température de fonctionnement du bras de robot:0-50°C |
|
Dispositif d'alimentation |
100-240 VAC 50-60Hz |
100-240 VAC 50-60Hz |
|
Durée de vie prévue |
35000 heures |
35000 heures |
|
Lignes de données de 6 m (du bras de la machine à la boîte de commande) |
||
|
Ligne de donnée s de 4,5 m (de l'écran tactile à la boîte de commande) |
||